NVIC(Nested vectored interrupt controller)為嵌套向量中斷控制器,當中每個中斷的優先級都是用暫存器當中的8 bit來做設置,也就是2^8=256,可以支持到256個中斷。但實際上在使用時僅使用高四位[7:4]來做設定,低四位為0,表示支援2^4=16級中斷。
在NVIC當中分為兩個優先級分組分別是Preemption Priority(主)與Sub Priority(子),字面上來看可以知道Preemption Priority比Sub Priority優先權來的高,在同一個優先級上數字越小越高。
有接觸過8051應該會比較好理解暫存器的設定,8051中也有中斷優先暫存器IP,可以依照bit去做中斷優先權的設定!
| 設備 | Preemption Priority | Sub Priority |
|---|---|---|
| A | 1 | 2 |
| B | 2 | 1 |
| 上表可以看到當B遇到中斷時,由於A的主優先級較高,這時候B會立即停止。等待A執行完畢後再輪到B執行。 | ||
| 設備 | Preemption Priority | Sub Priority |
| ------------- | ------------- | ------------- |
| A | 1 | 2 |
| B | 1 | 1 |
| 當兩設備Preemption Priority相同時,這時候就依照先後順序來決定誰先執行。 | ||
| 但當A與B同時到來時,這時候會先比較Preemption Priority發現兩者相同時,接著比較Sub Priority來決定何者先行執行。 | ||
| 優先級分組 | Preemption Priority | Sub Priority |
| ------------- | ------------- | ------------- |
| NVIC_PriorityGroup_0 | 0 | 0~15 |
| NVIC_PriorityGroup_1 | 0,1 | 0~7 |
| NVIC_PriorityGroup_2 | 0~3 | 0~3 |
| NVIC_PriorityGroup_3 | 0~7 | 0,1 |
| NVIC_PriorityGroup_4 | 0~15 | 0 |
進入到.ioc檔後左側選擇Sydtem Core 當中的NVIC可以看到中斷的設定~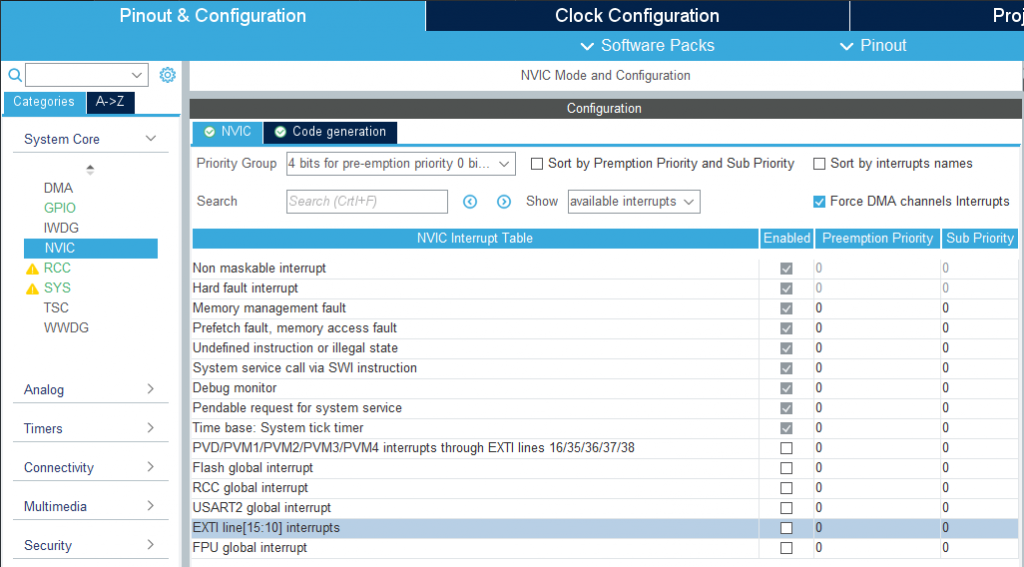
在上方的Priority Group 則是上方所提到的中斷分組,點開可以看到分成五組,每組須按照規定給予中斷分級。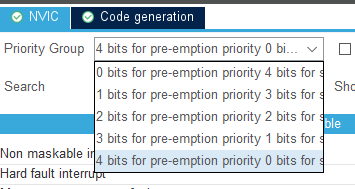
可以看到從最上方的是分組0最下方則是分組4,以分組0為例可以看到它是0 bits for pre-emption priority 4 bits for sub priority,意思也就是pre-emption priority只能設置為0,而sub priority可以設置0-15(2^4 = 16)。
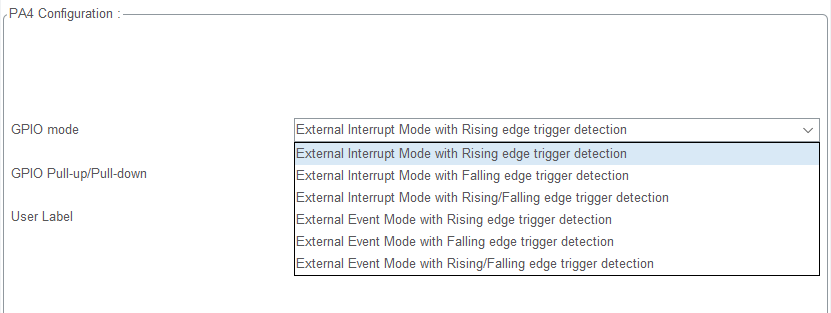
事件: 當檢測到一個動作觸發事件發生時,由硬體自動完成觸發到解決的狀況 。
中斷: 當有某個事件發生並觸發中斷後,由CPU介入跳到中斷服務常式中執行。
(中斷有可能被優先權更高的中斷搶先,而事件不會。事件可以在不需要CPU介入時執行動作)
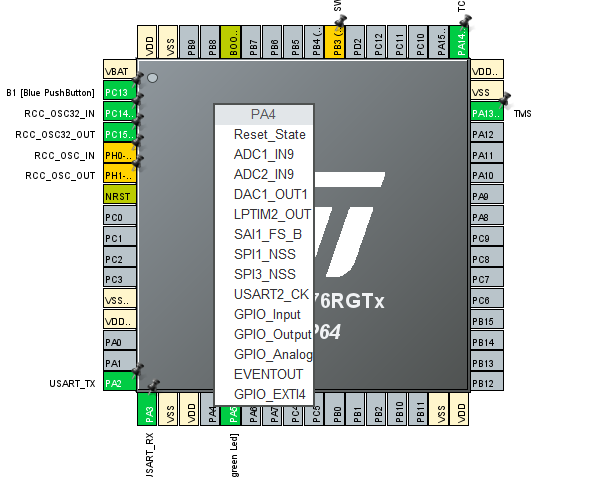
第二個GPIO Pull-up/Pull-down可以看看上一篇的介紹,默認設置為No pull-up and no pull-down
第三個User Label可以設定比較好區分的名稱
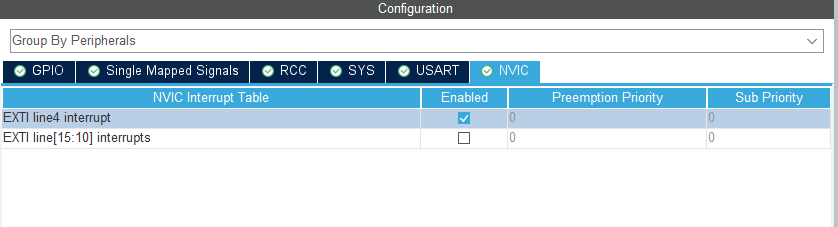
STM32的EXTI有20個中斷/事件線,每個GPIO都可以設為一個中斷(GPIO_0 ~ GPIO_15),另外4個為特殊用途。
同樣也可以直接透過暫存器去對中斷做設定,步驟大上至上如下:
硬體中斷
硬體事件
軟體中斷/事件
這邊說一下硬體中斷與軟體中斷的區別:
AFIO_EXTICRx : 控制20條中斷輸入線,一共有4個暫存器分別控制0-3、4-7、8-11、12-15。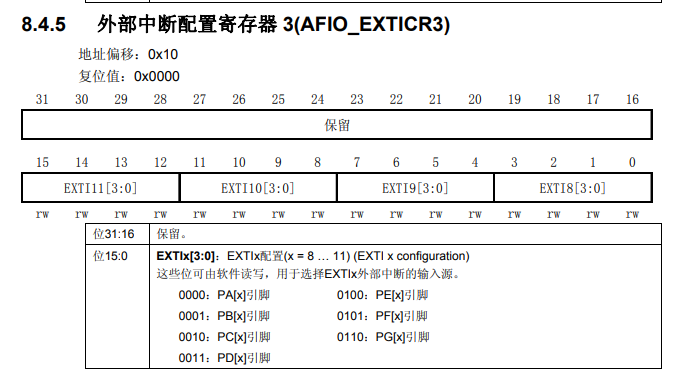
EXTI_IMR : 只有當對應的位設定為1時才會產生中斷,0-19共20條中斷線。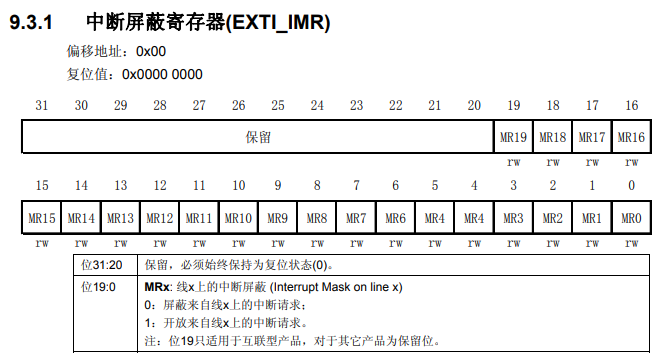
EXTI_EMR :同上,只有設置為1才會產生事件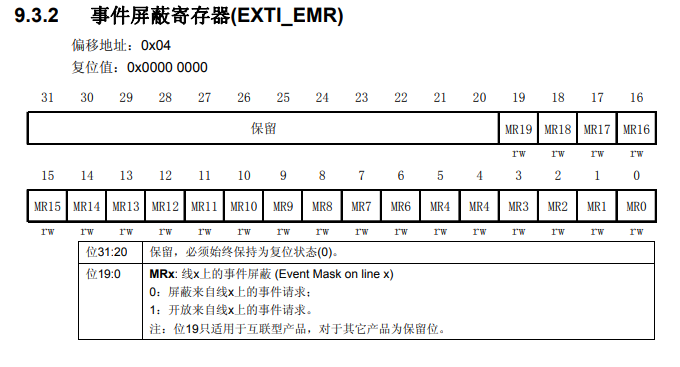
EXTI_RTSR : 觸發中斷條件,這邊是選擇觸發時是由低電位轉為高電位時觸發。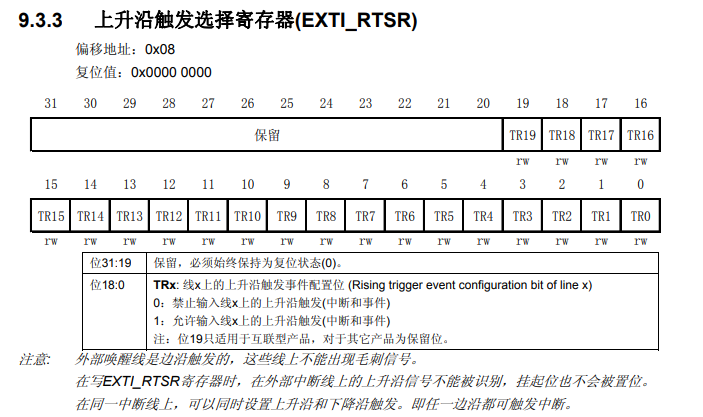
EXTI_FTSR : 同上為觸發條件,選擇觸發時是由高電位轉為低電位時觸發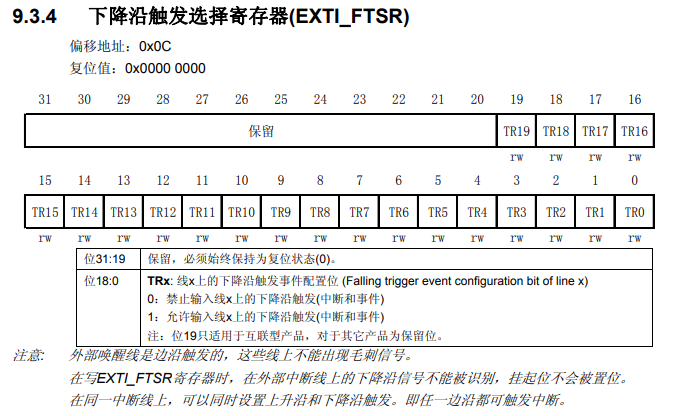
資料來源:STM32中文技術手冊
下方是STM32xxxx_HAL_Driver中GPIO的定義,可以看到外部中斷的回調函數。前面開頭關鍵字是弱定義的意思,假如其他地方定義過了會優先選擇。
__weak的介紹可以看連結這篇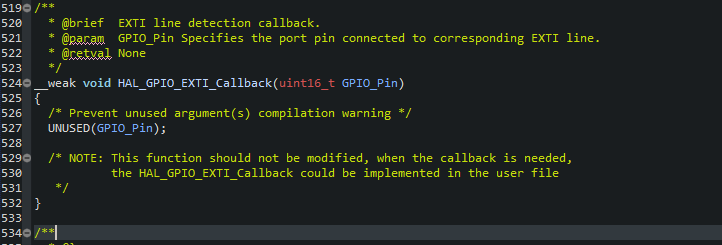
函數庫當中所定義的回調函數,用在當觸發了外部中斷後要做什麼事情,像是8051當中的中斷服務常式~ 兩者的目的是一樣的。
//8051 中斷服務常式
void EXIT_ISR(void) interrupt 2 //外部中斷向量為 2
{
.......
}
__weak void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
/* Prevent unused argument(s) compilation warning */
UNUSED(GPIO_Pin);
/* NOTE: This function should not be modified, when the callback is needed,
the HAL_GPIO_EXTI_Callback could be implemented in the user file
*/
}
HAL庫當中還有個函數是用來檢查中斷旗標有沒有被設定,如果有被設定了會清除中斷旗標,之後繼續呼叫上方的回調函數執行要做的事情!
void HAL_GPIO_EXTI_IRQHandler(uint16_t GPIO_Pin)
{
/* EXTI line interrupt detected */
if(__HAL_GPIO_EXTI_GET_IT(GPIO_Pin) != 0x00u)
{
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_Pin);
HAL_GPIO_EXTI_Callback(GPIO_Pin);
}
}
//使用方法
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_x);
我的R476LG開發版上有顆藍色的按鈕已經接好線了,不用在外接線去做外部中斷,可以直接利用這顆按鈕做測試~一樣查找DataSheet可以找到這顆按鈕的連接腳位(B1 USER)。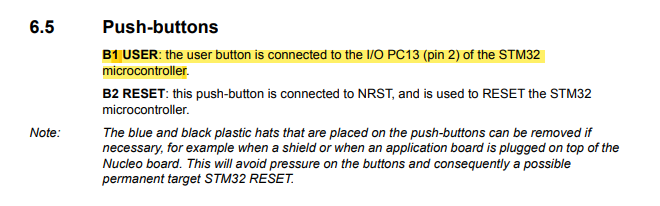
結合上一篇所提到的板載LED燈(LD2)可以去做LED燈模式的變化,LD2的腳位是PA5。
首先先找到main.c檔下方的/* USER CODE BEGIN 4 / / USER CODE END 4 */ 將中斷回調函數寫在這,記得先在最上放宣告全域變數 i。
/* USER CODE BEGIN 4 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
if(GPIO_Pin == GPIO_PIN_13)
{
i++;
}
}
/* USER CODE END 4 */
接著可以到while(1)當中去寫燈的模式變化,透過按下按鈕對i+1,當i/2的餘數為0時做第一種燈的變化,不為0時則做第二種變化。也可以在現場表達式中加入 i 去觀察變數的變化,是不是跟程式所寫的一樣!
while (1)
{
if(i%2==0)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, SET);
HAL_Delay(1000);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, RESET);
HAL_Delay(500);
}
else
{
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_5);
HAL_Delay(50);
}
}
以上內容如果有誤的話,麻煩各位通知我。感謝~
 TsaiiiY
TsaiiiY

 iThome鐵人賽
iThome鐵人賽